
CANopen : maîtriser la communication industrielle temps réel
Le protocole CANopen représente aujourd’hui une solution éprouvée pour les communications industrielles, particulièrement adaptée aux applications d’automatisation nécessitant des échanges de données fiables et en temps réel. Développé par le consortium CiA (CAN in Automation) à partir des années 1990, ce protocole s’appuie sur les fondations solides du bus CAN initialement conçu par BOSCH pour l’industrie automobile.
Contrairement aux approches propriétaires qui limitent l’interopérabilité, CANopen offre une standardisation complète qui facilite l’intégration de composants de différents fabricants. Cette approche normalisée permet aux techniciens et ingénieurs de déployer des solutions robustes tout en conservant une flexibilité d’évolution et de maintenance.
Fondements techniques et architecture
Le protocole CANopen s’appuie sur une architecture en couches qui respecte partiellement le modèle OSI. La couche physique utilise une paire torsadée différentielle avec une impédance caractéristique de 120 ohms, garantissant une excellente immunité aux perturbations électromagnétiques. Cette robustesse s’avère particulièrement appréciée dans les environnements industriels où les interférences électriques sont fréquentes.
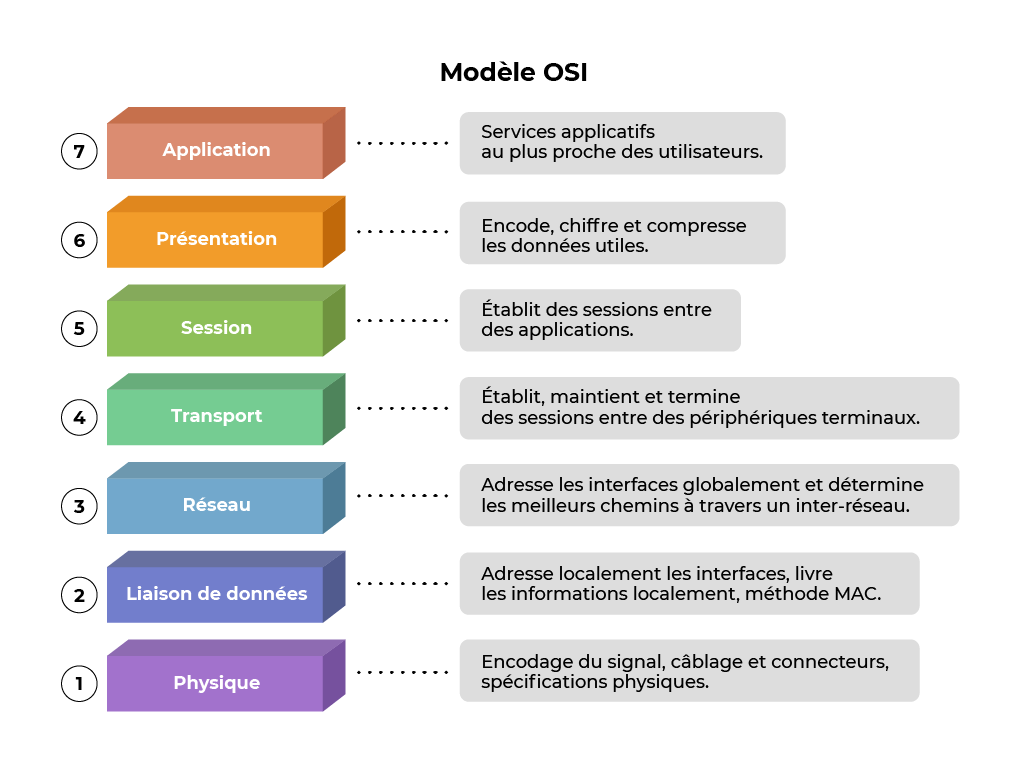
Modèle OSI (© openclassrooms.com)
La couche liaison hérite des spécifications CAN 2.0A, qui définissent un identifieur sur 11 bits appelé COB-ID (Communication Object IDentifier). Ce COB-ID détermine la priorité du message : plus sa valeur numérique est faible, plus le message est prioritaire. Cette gestion native des priorités permet une réactivité optimale pour les données critiques.
L’arbitrage non destructif constitue l’un des atouts majeurs de cette approche. Lors d’une collision entre plusieurs émetteurs, le mécanisme de bits dominants et récessifs permet de résoudre automatiquement le conflit bit par bit, sans perte de données ni nécessité de retransmission immédiate.
Performances et limitations pratiques
Cette relation inverse entre débit et distance impose une réflexion préalable sur l’architecture du réseau. Dans la pratique, de nombreuses installations industrielles trouvent un équilibre satisfaisant à 250 Kbit/s sur 250 mètres, permettant des temps de réponse inférieurs à 10 ms pour la plupart des applications de contrôle-commande.
La limitation à 8 octets de données utiles par trame peut sembler contraignante, mais elle s’avère généralement suffisante pour la majorité des variables industrielles. Les cas nécessitant des transferts plus volumineux utilisent le service SDO avec segmentation automatique des données.
Bénéficiez de notre expertise CANopen pour votre projet d'automatisation industrielle.
Gestion des données et dictionnaire d'objets
Le cœur de CANopen réside dans son dictionnaire d’objets (Object Dictionary), structure organisée qui décrit exhaustivement les fonctionnalités de chaque équipement. Chaque objet est accessible par un index 16 bits et un sous-index 8 bits, créant un espace d’adressage de plus de 4 millions d’objets possibles.
Cette organisation standardisée facilite considérablement l’intégration et la maintenance. Le fichier EDS (Electronic Data Sheet) matérialise ce dictionnaire au format ASCII, permettant aux logiciels de configuration comme SyCon ou Advantys de reconnaître automatiquement les capacités de chaque équipement.
Services de communication et échanges temps réel
CANopen définit quatre types de services de communication répondant à des besoins distincts. Les PDO (Process Data Objects) assurent la transmission rapide des données de process avec un overhead minimal. Ces objets fonctionnent selon le principe producteur-consommateur, permettant une diffusion efficace d’informations vers plusieurs destinataires simultanément.
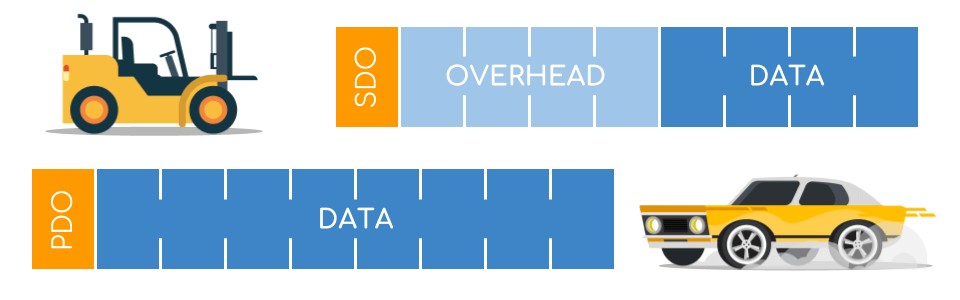
PDO & SDO (© cdebyte.com)
Les SDO (Service Data Objects) gèrent l’accès point à point au dictionnaire d’objets pour les opérations de paramétrage et de diagnostic. Ce service client-serveur avec acquittement garantit l’intégrité des transferts, même pour des données volumineuses nécessitant une segmentation.
Le service NMT (Network Management) coordonne le démarrage et la surveillance des équipements selon un modèle maître-esclave. Il gère les transitions entre les états pré-opérationnel, opérationnel et arrêté, assurant un démarrage ordonné du réseau.
Les objets spéciaux (SYNC, TIME STAMP, EMERGENCY) complètent l’architecture en fournissant la synchronisation temporelle et la gestion des défauts. L’objet SYNC permet notamment la coordination d’axes multiples avec une précision temporelle suffisante pour les applications de mouvement.
Configuration et mise en œuvre pratique
L’allocation des identifiants COB-ID peut s’effectuer selon trois méthodes. L’allocation par défaut (CANopen Predefined Set) simplifie la configuration initiale en attribuant automatiquement les identifiants selon le numéro de nœud (Node ID). Cette approche convient parfaitement aux architectures classiques avec un maître central et des esclaves distribués.
Pour des topologies plus complexes nécessitant des échanges directs entre esclaves, la reconfiguration des PDO permet d’établir des liens producteur-consommateur spécifiques. Cette flexibilité s’avère particulièrement utile pour les applications de commande d’axes ou de coordination de process.
Les logiciels de configuration actuels automatisent largement ces tâches. L’import du fichier EDS renseigne automatiquement les paramètres de base, tandis que l’interface graphique facilite la définition des échanges PDO et la configuration des paramètres de surveillance.
Surveillance et diagnostic réseau
CANopen propose deux mécanismes de surveillance des équipements : le Node Guarding traditionnel et le Heartbeat plus récent. Le Node Guarding fonctionne par interrogation périodique (polling) du maître vers chaque esclave, générant un trafic proportionnel au nombre d’équipements.
Le mécanisme Heartbeat optimise l’utilisation de la bande passante en inversant le principe : chaque équipement émet spontanément son état de santé selon une période configurée. Cette approche réduit significativement la charge réseau tout en maintenant un niveau de surveillance équivalent.
La gestion des erreurs s’appuie sur des compteurs intégrés (TEC et REC) qui quantifient les défauts d’émission et de réception. Le passage automatique en mode “erreur passive” puis “bus off” protège le réseau contre les équipements défaillants, préservant la communication des autres participants.
Retour d'expérience et domaines d'application
CANopen trouve sa place dans de nombreux secteurs industriels, des machines-outils aux systèmes de convoyage en passant par la robotique. Sa robustesse face aux perturbations électromagnétiques et sa capacité à gérer des priorités multiples en font un choix pertinent pour les environnements exigeants.
Les retours terrain confirment la fiabilité du protocole, avec des taux d’erreur résiduels inférieurs à 10⁻⁹ dans des conditions normales d’exploitation. La maintenance préventive se limite généralement à la vérification périodique des terminaisons de ligne et au contrôle de l’intégrité des câbles.
L’évolutivité constitue un autre avantage pratique : l’ajout d’équipements ou la modification de configuration s’effectuent sans impact sur les équipements existants, facilitant l’adaptation aux évolutions de process.
Perspectives et positionnement technologique
Malgré l’émergence de protocoles Ethernet industriels, CANopen conserve ses atouts pour les applications nécessitant un déterminisme temporel strict avec un coût maîtrisé. Son intégration native dans de nombreux contrôleurs industriels facilite son adoption et réduit les coûts d’implémentation.
Pour les projets d’automatisation de taille moyenne privilégiant la fiabilité et la simplicité de mise en œuvre, CANopen demeure une solution éprouvée. Sa standardisation complète garantit la pérennité des investissements tout en préservant la liberté de choix des fournisseurs d’équipements.
